为积极响应国家关于深化产教融合、促进教育链、人才链与产业链、创新链有机衔接的战略部署,服务上海及长三角地区智能制造与高端装备产业升级需求,上海第二工业大学智能制造与控制工程学院(以下简称“智控学院”)与节卡机器人股份有限公司(以下简称“节卡机器人”)基于双方已签署的校企合作协议,联合举办“具身智能与协作机器人应用技术”产教融合专项师资培训。本方案旨在通过系统的理论研修、前沿技术实训与真实项目转化,打造一支既精通专业理论又深谙产业实践的“双师型”教师队伍,为培养高素质应用创新型人才奠定坚实根基。
一、培训目标
秉持“从产业中来,到教育中去”的理念,依托节卡机器人在协作机器人领域全球领先的产业技术实力与智控学院在智能制造领域深厚的教学科研基础,通过“共研、共建、共享”的模式,打破校企壁垒。本次培训旨在将产业一线的技术热点、真实案例和岗位能力标准引入高校课堂,推动专业教学内容的动态更新与教学模式的深度改革,构建“技术研发-场景验证-人才输送”的闭环。
1. 知识体系更新:使学校参训教师深入理解具身智能的核心思想、协作机器人的技术前沿及其在工业制造、精密装配、智能服务等场景的创新应用。
2. 工程实践能力强化:通过项目驱动式(PBL)培训,重点提升教师在协作机器人编程、机器视觉集成、智能产线仿真与调试等方面的实战操作与工程化能力。
3. 教学转化能力提升:引导教师掌握将产业真实项目、前沿技术案例转化为可实施、可评价的教学模块、实训任务或课程设计的方法,推动“岗课赛证”融合。
4. 校企协同机制建立:以培训为起点,搭建稳定的校企师资交流平台,培育一批能够对接产业需求的骨干教师,并为共建课程、教材和实验室积累资源。
二、培训对象
以上海第二工业大学智控学院相关专业教师为主,建议参训教师具备机械、自动化、计算机等相关专业背景。
考核分为过程参与度、项目实操成果和教学转化方案设计三部分。合格者将获得由上海第二工业大学智能制造与控制工程学院与节卡机器人股份有限公司共同颁发的“产教融合师资培训结业证书”。优秀教学转化方案将获优先推荐,纳入校企共建教学资源库。
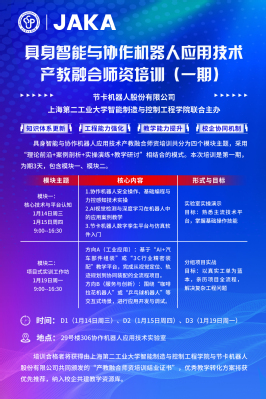
三、培训内容及时间安排
具身智能与协作机器人应用技术产教融合师资培训共分为四个模块主题,采用“理论前沿+案例剖析+实操演练+教学研讨”相结合的模式。本次培训是第一期,为期3天,包含模块一、模块二。
时间:D1(1月14日周三)、D2(1月15日周四)、D3(1月19日周一)
地点:29号楼306协作机器人应用技术实验室
模块主题 | 核心内容 | 形式与目标 |
模块一: 核心技术与平台认知 | 1. 协作机器人安全操作、基础编程与力控感知技术实操 | 实验室实操演示 |
模块二: 项目式实训工作坊 | 方向A(工业应用):基于“AI+汽车部件组装”或“3C行业精密装配”教学平台,完成从视觉定位、轨迹规划到协同装配的全流程项目。 | 分组项目实战 |
模块三: 产业趋势与技术前沿 | 1. 具身智能与协作机器人产业发展报告(解读长三角产业布局与人才需求) | 专题报告 |
模块四: 教学资源转化研讨 | 1. 如何将产业案例与实训项目转化为《工业机器人系统集成》《机器视觉》等课程的教学模块 | 研讨与案例设计 |
* 模块一、模块二2026年1月完成;模块三和模块四计划安排在2026年3月进行。
日 | 时间 | 培训主体 | 内容/知识点 |
D1 1月14日周三 | 09:00~10:00 | 机器人硬件部署与介绍 | 协作机器人技术路线和产品系列 |
机器人用户手册与技术文档导航 | |||
机器人硬件介绍与部署 | |||
机器人电气基础 | |||
机器人手柄的基本使用 | |||
10:00~10:15 | 休息+答疑 | ||
10:15~11:30 | 机器人软件安装、连接与参数配置 | APP 安装与连接机器人控制柜 | |
机器人运行前的参数配置 | |||
机器人拖拽示教与轨迹复现功能 | |||
机器人碰撞保护的介绍和使用 | |||
11:30~13:00 | 午餐+休息 | ||
13:00~14:00 | 机器人坐标系的认知与使用 | 机器人坐标系介绍 | |
机器人手动示教与基本移动指令编程 | |||
机器人变量设置与管理 | |||
14:00-14:15 | 休息+答疑 | ||
14:15-15:15 | 机器人手动示教与路径规划 | 工作坐标系的介绍和应用 | |
用户坐标系的介绍和应用 | |||
15:15-15:30 | 休息+答疑 | ||
15:30-16:30 | 机器人变量管理与IO接口 | 机器人IO 接口的介绍和应用 | |
实操:基于末端柔性爪的物料搬运 | |||
拓展:IO接口组合使用 | |||
D2 1月15日周四 | 09:00~10:00 | 机器人案例程序分析与实操 | 托盘指令介绍和编程 |
实操:基于托盘指令完成2*3 码垛 | |||
拓展:异型码垛 | |||
10:00~10:15 | 休息+答疑 | ||
10:15~11:30 | 机器人现场总线通讯应用(一) | 拓展:机器人回原位的程序设计 | |
Modbus 通讯协议介绍 | |||
机器人Modbus TCP 通讯的参数设置(从站) | |||
实操:机器人与Modbus Poll 软件实现数据交互 | |||
实操:Modbus Poll 软件读取机器人相关状态信息 | |||
11:30~13:00 | 午餐+休息 | ||
13:00~14:00 | 机器人现场总线通讯应用(二) | 功能IO 的介绍和配置 | |
实操:基于Modbus TCP 实现机器人初始化 | |||
机器人Modbus TCP 通讯的参数设置(主站) | |||
实操:机器人与Modbus Slave 软件实现数据交互 | |||
机器人Modbus RTU 通讯的参数设置 | |||
实操:基于Modbus RTU 控制DH 电爪完成物料抓取(机器人为主站) | |||
14:00-14:15 | 休息+答疑 | ||
14:15-15:15 | 机器人Socket通讯应用 | Socket 通讯介绍 | |
实操:基于Socket 和字符串指令完成数据解析 | |||
拓展:上位机给机器人发送点位信息并运动 | |||
15:15-15:30 | 休息+答疑 | ||
15:30-16:30 | 机器人系统升级与数据备份 | 机器人系统升级与数据备份 | |
机器人其他功能介绍与设置 | |||
机器人申请技术支持和售后答疑 | |||
D3 1月20日周一 | 09:00~10:00 | 多模态教学套件(一) | anaconda 虚拟环境安装与相关指令讲解 |
针对nano板卡的torch安装方式 | |||
本地语音转文字模型使用 | |||
tts语音合成系统使用 | |||
10:00~10:15 | 休息+答疑 | ||
10:15~11:30 | 多模态教学套件(二) | 相机标定使用方法 | |
手眼标定眼在手外使用方法 | |||
yolo视觉识别检测使用方法 | |||
针对大模型的提示词功能 | |||
大模型联合各模块调用完成具身智能功能 | |||
11:30~13:00 | 午餐+休息 | ||
13:00~14:00 | 装配工艺基础 | 力控指令介绍和编程 | |
实操:协作机器人变速箱齿轮装配 | |||
14:00-14:15 | 休息+答疑 | ||
14:15-15:15 | 基于Modbus通讯协议的应用基础 | Modbus_RTU 通讯协议介绍 | |
机器人Modbus_RTU 通讯的参数设置 | |||
实操:机器人与胶枪控制器和拧紧枪控制器实现数据交互 | |||
15:15-15:30 | 休息+答疑 | ||
15:30-16:30 | 涂胶、锁付工艺基础 | 基于Modbus_RUT的涂胶参数介绍 | |
实操:机器人通过Modbus_RTU设定涂胶参数并完成涂胶程序 | |||
基于Modbus_RUT的锁附参数介绍 | |||
实操:机器人通过Modbus_RTU设定锁附参数并完成锁附程序 | |||
装配、涂胶、锁付工艺的问题答疑 | |||
四、预期成果
形成一份动态教学资源包。包含本次培训的经典案例、实操项目指导书、教学转化范例,作为可复用的校本资源。
孵化一批教学改革项目。推动校内参训教师在其主讲课程中融入培训内容,2026年立项一批课程思政、项目化教学改革课题。
建立一个常态化交流工作群。建立线上工作群,保持校企间在技术、教学问题的持续沟通。
探索一个长效合作范式:为双方后续共建具身智能与协作机器人微专业/专项班、联合开发活页教材、申报产教融合项目奠定坚实基础,共同为机器人行业应用型人才培养、服务区域新质生产力发展提供“二工大-节卡方案”。